It was decided to build a servo tester that was more than a basic manual knob or cyclic tester. The requirements included the following:
To meet those requirements it was decided to develop a tester using an Arduino board and fixture from basic materials. Below is a picture of the basic tester that was deployed to an Arduino Nano board. The code has also ran on a Leonardo and a Mega 2560. The tester can be operated with only USB power as long as the load is low. This is typically just a free standing servo. The voltage with USB is 5 volts to the servo. The other way to power the tester and servo is to use a battery. The voltage should be from 5.0 to 8.4 volts (2s Lipo). When using battery power, the voltage going to the servo based on how the jumper is connected. As seen in the picture below, if the servo tester lead is connected to the power connector coming from the Arduino board, the voltage will be 5.0 volts. If the lead connector is hooked up to the battery power cable, the servo received direct battery voltage. Note, under load testing, the battery power should be used to avoid damaging the Arduino board.



Below is the link to the Arduino code that runs in the Arduino Nano or compatible board. One suite of tests consist of the series shown below. After each test there is a one minute cool down period before the next test. This suite of tests is repeated 4 times with a 2 minute cool down between suites.
Before and after each test, the LED will have a series of long blinks and a short blinks. The number of long blinks indicates which suite number it is on and the number of short blinks which test in the suite. For example two long blinks and five short blinks means the tester is on the second suite and either starting or just finished the fifth test.
Multiple servos were tested/burned in before use. An uncalibrated Watt meter was used during the test so the servo power and Watt-Hour used should still be comparable. Because some of the servos had lower torque, different springs and starting lengths were used. In the future if time permits I may change them into Spring constants and starting force.
| Test No. | Servo | Spring No. | Spring Index | Grease | Rough Noise | Vmax | Vmin | Amax | Wmax | WattHr | Notes |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1.0 | Blue Bird BLS-2112 #1 | 1 | 4 | Good | No | 8.03 | 7.3 | 3.33 | 15.3 | 0.9 | -- |
| 2.0 | Blue Bird BLS-2112 #2 | 1 | 4 | Good | No | 8.24 | 7.51 | 3.3 | 18.0 | 1.0 | Heard and saw some skipping in the test. Happens at extreme clockwise motion under load. |
| 3.0 | Blue Bird BLS-2112 #3 | 1 | 4 | Good | No | 8.28 | 7.43 | 3.44 | 25.3 | 1.2 | -- |
| 4.0 | Blue Bird BLS-1004 #1 | 3 | 3 | Bad, replaced | No | 8.21 | 7.44 | 3.27 | 20.2 | 1.1 | Had to stop original test with Spring #1. Servo stalled at 4.61 amps (34 Watts). This is a high speed servo (Helicopter Tail) |
| 5.0 | Blue Bird BLS-26A #1 | 1 | 4 | Good | No | 8.34 | 7.33 | 4.28 | 30.4 | 1.3 | -- |
| 6.0 | Blue Bird BLS-26A #2 | 1 | 4 | -- | No | 8.31 | 7.20 | 4.62 | 32.3 | 1.6 | -- |
| 7.0 | Blue Bird BLS-26A #3 | 1 | 4 | -- | No | 8.43 | 7.11 | 5.17 | 26.4 | 1.1 | -- |
| 8.0 | Align BL815 #1 | 1 | 4 | -- | No | 8.31 | 7.76 | 2.56 | 17.3 | 0.1 | Very quite |
| 8.1 | Align BL815 #1 | 1 | 4 | -- | No | 8.16 | 7.53 | 2.20 | 16.1 | 0.1 | Very quite |
| 9.0 | Align BL815 #2 | 1 | 4 | -- | No | 8.29 | 7.71 | 2.77 | 19.3 | 0.4 | Very quite |
| 9.1 | Align BL815 #2 | 1 | 4 | -- | No | 8.31 | 7.74 | 2.88 | 20.6 | 0.4 | Very quite |
| 10.0 | Align BL815 #3 | 1 | 4 | -- | No | 8.15 | 7.50 | 2.91 | 18.9 | 0.2 | Very quite |
| 10.1 | Align BL815 #3 | 1 | 4 | -- | No | 8.33 | 7.72 | 2.95 | 23.1 | 0.1 | Very quite |
| 11.0 | Align BL855 #1 | 3 | 3 | -- | No | 8.31 | 7.53 | 2.73 | 19.5 | 0.9 | Very quite |
| 11.1 | Align BL855 #1 | 3 | 3 | -- | No | 8.00 | 7.42 | 2.86 | 16.8 | 0.9 | Very quite |
| 12.0 | Graupner HBS 690 BB MG #1 | 3 | 3 | -- | No | 8.33 | 7.89 | 1.26 | 6.9 | 0.2 | Switched to metal gears |
| 12.1 | Graupner HBS 690 BB MG #1 | 3 | 3 | -- | No | 8.07 | 7.56 | 1.53 | 7.6 | 0.1 | Switched to metal gears |
| 13.0 | Graupner HBS 690 BB MG #2 | 3 | 3 | -- | No | 8.33 | 7.82 | 1.86 | 9.2 | 0.3 | Switched to metal gears |
| 13.1 | Graupner HBS 690 BB MG #2 | 3 | 3 | -- | No | 8.10 | 7.66 | 1.52 | 8.2 | 0.2 | Switched to metal gears |
| 14.0 | Graupner HBS 690 BB MG #3 | 3 | 3 | -- | No | 8.31 | 7.77 | 1.78 | 7.9 | 0.3 | Switched to metal gears, had bad wiring. |
| 14.1 | Graupner HBS 690 BB MG #3 | 3 | 3 | -- | No | 8.31 | 7.89 | 1.82 | 9.9 | 0.3 | Switched to metal gears, had bad wiring. |
| 14.2 | Graupner HBS 690 BB MG #3 | 3 | 3 | -- | No | 8.10 | 7.74 | 1.31 | 9.2 | 1.0 | Total Watt-Hour used seems high, will re-run test. Switched to metal gears, had bad wiring. |
| 14.3 | Graupner HBS 690 BB MG #3 | 3 | 3 | -- | No | 8.31 | 7.76 | 1.60 | 8.3 | 0.3 | Watt-Hour better. Switched to metal gears, had bad wiring. |
| 15 | Hypernion HP-DS20x-SMD | 1 | 3 | -- | No | 5.97 | 4.70 | 1.61 | 6.9 | 0.9 | All metal gears. Made in Korea |
| 16 | Hypernion HP-DS20x-GCD | 3 | 3 | -- | No | 5.97 | 4.97 | 1.36 | 6.6 | 0.7 | High Speed. Made in Korea |
| 17 | Hypernion HP-DS20x-SMD | 1 | 4 | -- | No | 5.97 | 4.81 | 1.47 | 6.6 | 1.0 | All metal gears. Made in Korea |
To save righ click on the link and choose the 'Save' option. Version 1.2 =>servo_burnin_one.ino
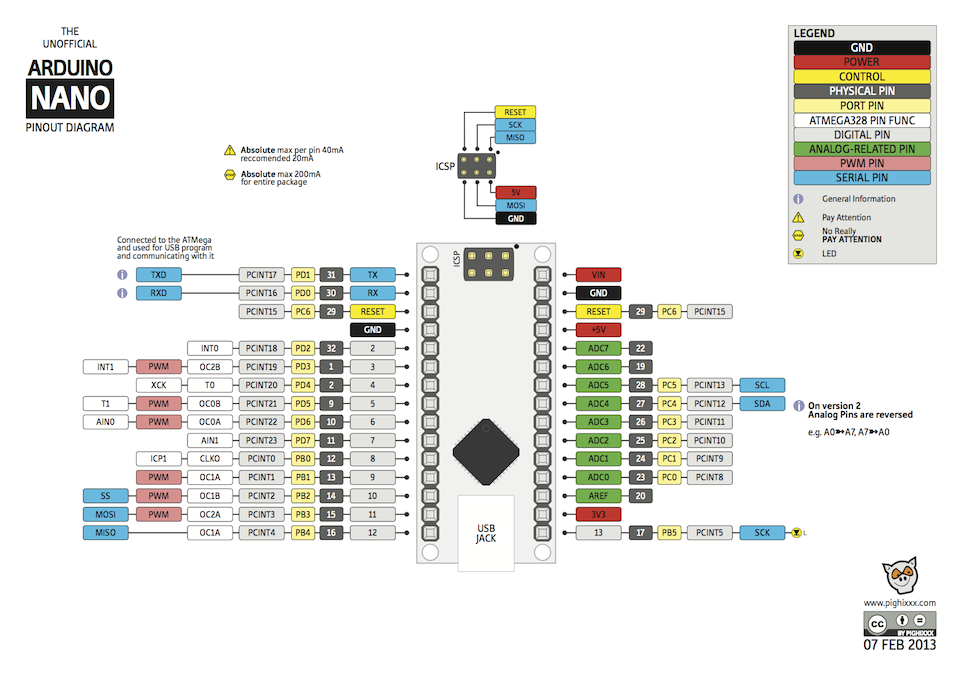
This pinout diagram was found on the 'pighixxx.com' site which seems to no longer be around. Nano Pinoout
Back to WashingtonPilot
Servo Home
{kind=link}